




IMU: How Does It Enable Precise Motion Tracking?
I. Introduction
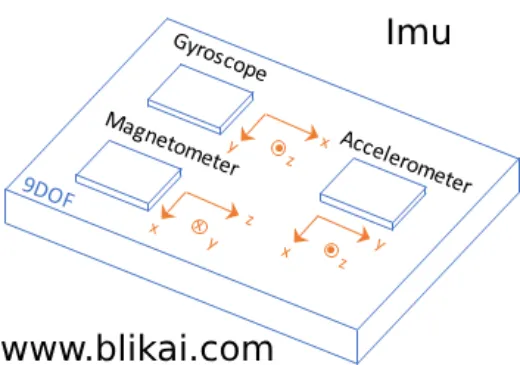
Crucial rudiments of stir shadowing systems are inertial measurement units( IMUs), which give vital information about an object's direction, haste, and gravitational force. They're made up of several detectors, including magnetometers, gyroscopes, and accelerometers, which enable precise stir shadowing in a variety of settings.
II. Components of Inertial Measurement Units
A. Accelerometer: Measure linear acceleration
One of the main corridor of inertial measurement units is an accelerometer, which can measure direct acceleration in numerous directions. Through the detection of acceleration variations, they offer crucial insights on the motion of an item in space. Accelerometers detect acceleration forces precisely by converting mechanical motion into electrical impulses using concepts like capacitance and piezoelectricity.
B. Gyroscope: Measure angular velocity
Gyroscopes are crucial tools for calculating angular velocity or rotational motion. They're made up of a wobbling structure or a rotating mass that keeps its exposure in the face of outside forces. Gyroscopes can descry changes in rotational haste in addition to accelerometer data, which can be used to estimate angular instigation and object exposure.
C. Magnetometer: Measure magnetic field strength
The magnetic field surrounding an object is measured using magnetometers for both strength and direction. Accurate direction is made possible byinertial measurement unitsmagnetometers, which offer orientation data in relation to the Earth's magnetic field. Despite being less current than accelerometers and gyroscopes, magnetometers are essential for accurate exposure shadowing in operations like stoked reality widgets and navigation systems.
III. The main types of IMUs
A. Sensor Types:
- Gyroscopes (Gyros): To measure angular velocity or rotational velocity about various axes, inertial measurement units may include one or more gyroscopes.
- Accelerometers: Along one or further axes, these detectors record direct acceleration.
- Magnetometers: To descry the glamorous field's strength and direction and aid in determining exposure, certain inertial measurement units come equipped with magnetometers.
- Inclinometers: these bias determine how tilted or incline an object is in relation to graveness.
B. Integration Level:
- Uniaxial inertial measurement units: these inertial measurement units are employed in basic applications that need motion detection in a single direction. They monitor motion along a single axis.
- Multi-axis inertial measurement units: These inertial measurement units provide more thorough motion detection capabilities by measuring motion along multiple axes.
C. Size and Form Factor:
- Miniature inertial measurement units: They're featherlight, small inertial measurement units made for operations like wearables, drones, and UAVs where weight and space are important considerations.
- Ultra-precise inertial measurement units: These inertial measurement units are constantly employed in space, defense, and disquisition operations where exact stir shadowing is pivotal. They offer remarkable delicacy and responsibility.
D. Application:
- Navigation inertial measurement units: these inertial measurement units measure location, velocity, and orientation in navigation systems of vehicles, ships, aircraft, and spacecraft.
- inertial measurement units for motion capture. In order to record and analyze human motion, motion capture inertial measurement units are utilized in biomechanics, sports science, and entertainment.
- Robotics inertial measurement units: inertial measurement units are utilized in robotic applications to drive autonomous vehicles, robotic arms, and drones.
- inertial measurement units for consumer electronics: inertial measurement units are built into wearable technology, game controllers, tablets, smartphones, and other gadgets to perform tasks including motion detection, screen rotation, and activity tracking.
IV. Operating Principle of Inertial Measurement Units
A. Integration of sensor data to estimate orientation and motion
Inertial measurement units aggregate data from accelerometers, gyroscopes, and magnetometers using complex algorithms. inertial measurement units combine data from colorful detectors to determine an object's position, haste, and exposure in real time. To acquire accurate motion information, this integration process includes filtering out noise, compensating for sensor faults, and applying mathematical models.
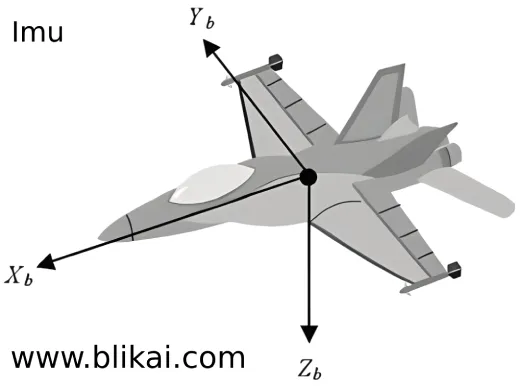
B. Calibration and alignment procedures for accurate measurements
The transducer measures need to be calibrated to regard for shifts, misalignments, andnon-linearity in the transducer labors. Furthermore, in order to provide precise motion tracking, alignment processes align the sensor axes with the object reference frame. In order to provide dependable performance in a range of operating settings and environments, proper calibration and alignment help reduce errors and drift ininertial measurement unitsmeasurements. To expedite the calibration process and sustain measurement accuracy over time, advancedinertial measurement unitssystems can make use of automated calibration processes and integrated self-test mechanisms.
V. Features and Functions of Inertial Measurement Units
1. Sensor integration: To measure various aspects of motion and orientation, inertial measurement units usually integrate accelerometers, gyroscopes, and magnetometers.
2. Accelerometer: This device detects changes in direction and speed by measuring direct acceleration along each axis.
3. Gyroscope: Provides information on an object's rotational stir by detecting angular haste or rotational haste about each axis.
4. Magnetometer: This device helps identify how the Earth is acquainted in relation to the glamorous field by measuring the strength and direction of the glamorous field.
5. Orientation estimation: Inertial measurement units are able of estimating an object's position, haste, and exposure in three confines by integrating data from accelerometers, gyroscopes, and magnetometers.
6. Calibration and alignment: In order to guarantee precise measures and account for detector faults, inertial measurement units need to suffer estimation and alignment processes.
7.Real-time tracking: Inertial measurement units are essential for operations like virtual reality, robotics, and space navigation systems because they allow for the real- time shadowing of stir and exposure.
8. Compact size: A lot of inertial measurement units are featherlight and compact, making it simple to integrate them into a range of systems and bias.
9. Low power consumption: nertial measurement units can run on batteries because of their design, which minimizes power consumption.
10. Wide Range of Applications: Accurate stir shadowing and exposure discovery are critical in a number of diligence, including consumer electronics, sports wisdom, automotive, marine, and aerospace. These diligence use inertial measurement units.

VI. Applications of IMUs
A. Aerospace: Navigation systems for aircraft and spacecraft
IMUs are essential to the navigation systems of aircraft and spacecraft in aviation. They give precise flight control, guiding, and stabilization by providing vital information for attitude determination, velocity estimation, and location monitoring. IMUs are used in Inertial Navigation Systems(INS), station and Heading Reference Systems(AHRS), and Autopilot systems to guarantee safe and reliable flight operations indeed in delicate circumstances like space operations or locales without GPS.
B. Robotics: Control of robotic arms and drones
In order to regulate the stir and exposure of robotic arms, drones, independent buses , and mobile robots, inertial measurement units are a pivotal element of robotics. inertial measurement units measure accelerations, angular rapidity, and glamorous fields constantly to enable precise stir planning, line shadowing, and robot platform stabilization. They let robots carry out activities with great accuracy and efficiency, stay stable, and navigate through challenging surroundings.
C. Virtual Reality: Head and body tracking in VR systems
Inertial measurement units are used by virtual reality(VR) systems to track the head and body of druggies, giving them a responsive and immersive experience. inertial measurement units used into virtual reality headsets are suitable to track minute head movements, reels, and accelerations in real time, enabling the virtual world to impeccably match the stoner's movements. With this shadowing capacity, druggies can engage with digital content in a natural and intuitive way, perfecting their sense of presence and absorption in virtual worlds.
VII. Advantages and Disadvantages of Inertial Measurement Units
A. Advantages
Compact size: One of the main benefits of inertial measurement units is their tiny size, which makes it possible to include them into devices and systems with constrained space. inertial measurement units have this point, which makes them useful in operations where size and weight are important, like consumer electronics, unmanned upstanding vehicles( UAVs), and movable widgets.
Low Power Consumption inertial measurement units are frequently modest power druggies, which makes them energy-effective corridor of movable systems and widgets that run on batteries. Their capacity to deliver precise motion monitoring while preserving energy prolongs battery life and boosts the performance of many applications, such as fitness trackers, smartphones, and Internet of Things gadgets.
Real-Time Tracking: inertial measurement units can measure and analyze changes in orientation, acceleration, and angular velocity instantly since they have real-time motion tracking capabilities. For dynamic motion control, navigation, and virtual reality applications—where quick and precise data processing is necessary for responsive system behavior and user interaction—this real-time input is indispensable.
B. Disadvantages
Drift Errors: inertial measurement units are vulnerable to drift errors, which over time can compound and result in inaccurate orientation estimates. Sensor noise, tilt, and integration errors are some of the causes that lead to drift, particularly in long-term operations. Over time, sensor aggregation algorithms and calibration strategies are utilized to reduce drift and preserve the accuracy ofinertial measurement unitsmeasurements.
Susceptibility to Magnetic Interference: Magnetometer-equipped inertial measurement units are vulnerable to magnetic disturbances from surrounding metal objects, electric currents, and outside magnetic fields. This disruption may cause measurements of the magnetic field to be distorted, which would impair motion tracking and orientation estimate accuracy. In magnetically noisy situations, shielding strategies, sensor calibration, and environmental mapping are employed to reduce magnetic disturbances and enhance the dependability ofinertial measurement unitsdata.
Need for Calibration: In order to account for sensor flaws, alignment mistakes, and environmental changes that may impact measurement accuracy, inertial measurement units need to be calibrated. Sensor fusion algorithms must be calibrated, sensor parameters must be adjusted, and sensor outputs must be checked against reference data under controlled circumstances. Frequent calibration boosts theinertial measurement unitsreadings' performance and reliability in real-world applications by ensuring their consistency and integrity.
VIII. Conclusion
In conclusion, a variety of diligence and operations depend on inertial dimension units( iMUs) for precise stir shadowing and exposure estimates. Accurate data on direct acceleration, angular haste, and glamorous field strength can be attained with inertial measurement units in confluence with accelerometers, gyroscopes, and magnetometers. This allows for precise motion analysis in robotics, virtual reality, and other applications.
Final Thoughts
Inertial dimension units technology is expected to continue advancing in terms of use, performance, and dependability in the future. More small, reasonably priced, and preciseinertial measurement unitssolutions are anticipated as a result of advancements in sensor integration methodologies, miniaturization, and cost reduction. Furthermore, current R&D endeavors are probably going to tackle current constraints like drift and interference susceptibility, creating new avenues for IMU-enabled applications in a world growing more networked by the day.







