




Inertial Measurement Unit (IMU): Working & Applications
What Is an Inertial Measurement Unit (IMU)?
An Inertial Measurement Unit is an electronic unit that detects the specific force and angular velocity of an object, as well as, in some cases, the magnetic orientation of an object, which is a combination of sensors in one device. Unlike single motion sensors that detect only one parameter, an IMU continuously tracks movement across multiple axes, allowing embedded systems to calculate position changes and orientation in three-dimensional space. IMUs work on the inertial principles, i.e. they can sense the movement within the IMU, and this does not require the external positioning signals like GPS and cameras that are not available and reliable in those environments.
IMU vs Motion Sensor
Most devices have motion sensors, but an IMU is much different since it combines various sensing types into one measurement platform with the capability to analyze motion in a sophisticated manner. An accelerometer cannot measure any rotational movement or long-term orientation since a simple motion sensor like an accelerometer can only detect linear acceleration or a tilt, but not rotational movement. An IMU combines accelerometers, gyroscopes, and often magnetometers to create a complete motion-tracking solution, enabling sensor fusion algorithms to calculate accurate orientation and movement trajectories.
Main Components of an IMU
Accelerometer
The accelerator, which is within an IMU, measures linear acceleration that occurs along one or more axes, and it senses the velocity change due to motion or due to gravity. The accelerator can measure forces of acceleration and thus calculate tilt angles with respect to the gravitational field of the earth and is therefore applicable in detecting the orientation in smartphones, wearable devices and robotic platforms. Accelerometers are normally used to measure acceleration in three orthogonal directions (X, Y and Z) to detect three-dimensional motion, but they are vulnerable to noise and vibration, and this necessitates filtering methods to ensure accuracy.
Gyroscope
An angular velocity is a component of a gyroscope that measures the rotation velocity around an axis, and the system can determine how quickly and in what direction an object rotates. This is needed to stabilize and do orientation tracking since rotating cannot be effectively sensed by the accelerometers alone. Current IMUs are based on MEMS gyroscopes that may take advantage of the vibrating structures to measure Coriolis forces created during rotation so as to track the motion accurately in applications like drones, game controllers, and systems to stabilize a camera.
Magnetometer
A magnetometer is a sensor that reads the local magnetic field, and it is some sort of digital compass, one that gives information about the heading compared to the magnetic north of the Earth. Combined with an IMU, the magnetometer is used to correct a drift in the gyroscopes and enhance long run accuracy of orientation, especially in navigation systems. Although magnetic measurements can be affected by nearby electronic components or metal objects, proper calibration allows magnetometers to significantly enhance directional awareness in robotics, smartphones, and autonomous navigation platforms.
Optional Sensors in Advanced IMUs
Innovative IMUs can contain more sensors, like barometric pressure sensors to estimate the altitude, temperature sensors to compensate and calibrate and special sensor fusion processors for data processing onboard. These additions bring stability to measurements and lessen the calculations that are needed in host systems, making high-end IMUs applicable to aerospace navigation, automation in industries and precision motion tracking where environmental changes need to be calculated continuously.
How an IMU Works
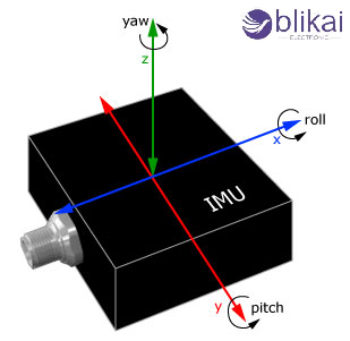
An IMU is applied using mathematical algorithms that allow estimation of motion and orientation through constant sampling of motion data provided by internal sensors. Linear acceleration is measured by accelerometers, rotational rates by gyroscopes and directional reference by magnetometers, and a combination of these data is taken by embedded processing algorithms to derive stable orientation data in the form of roll, pitch and yaw angles. Since the sensors possess advantages and disadvantages, simultaneous data collection through them means that the error of one sensor can be counterbalanced by another, and thus the motion can be estimated accurately even in a dynamic environment.
Sensor Fusion Algorithms
Sensor fusion is the process of computing that takes data from several sensors and combines them to enhance the accuracy and reliability of the measurements. Common algorithms include complementary filters, which blend accelerometer and gyroscope data using frequency-based weighting, and Kalman filters, which apply probabilistic models to estimate system states while minimizing noise and uncertainty. These algorithms also allow IMUs to provide stable orientation data through vibration, drift and measurement noise, and are necessary to autonomous systems and real-time motion control.
Types of Inertial Measurement Units
MEMS IMUs
The most used type is MEMS (Micro-Electro-Mechanical Systems) IMUs that are miniature in size, use lower energy, and are also cheap. Manufactured using semiconductor fabrication techniques, MEMS IMUs integrate mechanical sensing elements directly onto silicon chips, enabling mass production for smartphones, drones, gaming devices, wearable electronics, and IoT systems. More modern MEMS IMUs offer the desired level of precision in the majority of consumer and industrial applications, although not as precise as more expensive options.
Fibre Optic IMUs
Fibre optic IMUs incorporate fibre optic gyroscopes, which respond to rotation based on light interference patterns and not mechanical movement, which has a high level of precision and very good stability. These systems are typically applied in aircraft navigation, marine systems and military applications where very long-term accuracy and reliability are of the essence.
Ring Laser Gyro IMUs
Ring laser gyro IMUs employ laser beams travelling in opposite directions within a closed optical path to measure rotation using the Sagnac effect. Applications of these highly accurate systems are in aerospace navigation, spacecraft control and defence systems, where any errors in measurement at all cannot be tolerated.
Applications of Inertial Measurement Units
Consumer Electronics
IMUs find applications in the consumer electronics industry in smartphones, gaming controllers, fitness trackers and wearable devices to support screen rotation, motion tracking, step counting, and gesture recognition. They are small and use less power, hence suited to portable electronics, to which precise motion detection would increase user interaction and functionality.
Robotics and Automation
In autonomous mobile robots and even humanoid systems, IMUs play a major role in balance control, navigation, and stabilization of motion in the robots. IMU data allows robots to maintain orientation, detect movement changes, and perform precise positioning tasks even when visual sensors are unavailable or obstructed.
Automotive Systems
IMUs are used in automotive systems that have electronic stability control, rollover, advanced driver assistance systems (ADAS), and autonomous vehicle navigation. IMUs can enhance safety, traction control and accuracy of navigation in different conditions of driving due to constant monitoring of vehicle dynamics.
Aerospace and Drones
IMUs are used in aircraft and drones to stabilize the flight, as well as control the aircraft in attitude and inertial navigation, and enable the stable functioning of flight even in high maneuverability or when the GPS is unavailable. Maintaining balance and path is vital to safe and reliable aerial operation, and high-speed orientation updates help flight controllers to do this.
Industrial and IoT Applications
Industrial systems use IMUs for equipment monitoring, vibration analysis, predictive maintenance, and asset tracking. In IoT deployments, IMUs provide contextual awareness, enabling smart devices to detect motion patterns and environmental interactions that improve automation efficiency and operational reliability.
Medical and Sports Technology
IMUs find applications in both healthcare and sports technology as a motion capturing method, rehabilitation, gait and performance tracking technology. The quantitative examination of the movement patterns makes wearable IMU systems valuable to the clinician and trainers to enhance the diagnostics and optimization of athletic performance.
Advantages and Disadvantages of IMUs
IMUs have a number of benefits, such as the ability to work without outside signals, the ability to measure in real time, being very small in size, and responsiveness, but include drawbacks, including drift accumulation, vibration sensitivity, and calibration needs. Small measurement errors may grow over time to cause large positional errors, and this is why IMUs are usually used in conjunction with GPS, vision systems or external references to provide long-term navigation accuracy.
IMU vs GPS: Key Differences
IMUs and GPS have complementary uses in the navigation systems, wherein the IMUs are used to track relative motion, and GPS give the absolute location. IMUs work indoors and react immediately to the change in motion, whereas GPS can be long-term accurate in position but is susceptible to latency or signal blockage. By integrating the two technologies, there are strong navigation systems that can be used in various settings.
Future Trends in IMU Technology
Future development of IMU aims at the enhancement of accuracy by enhancing sensor fusion, artificial intelligence and minimizing power consumption, combined with further miniaturization. New technologies seek to make fully autonomous systems, more augmented reality, and more intelligent industrial robots by providing more reliable motion information with less computation requirements.
FAQs
Can an IMU work without GPS?
Yes, the IMUs are independent of GPS, but they can increase the errors in position with long-range.
What is a 9-DOF IMU?
A 9-DOF IMU is a system consisting of an accelerometer, gyroscope, and magnetometer (3-axis) to track the complete motion.
Why is IMU calibration necessary?
Calibration eliminates sensor bias and environmental errors in order to have better measurements.
Conclusion
Inertial Measurement Units have become foundational components in modern electronics by enabling machines to sense motion and orientation with remarkable precision, supporting technologies ranging from smartphones and wearables to autonomous vehicles and aerospace navigation systems. IMUs offer a solution to motion awareness even in difficult circumstances with unknown external references, through a combination of accelerometers, gyroscopes and magnetometers with sophisticated sensor fusion algorithms. With further development of sensor technology, IMUs will have a more prominent role in robotics, intelligent transportation, industrial automation, and future consumer electronics, and determine the future of motion-sensitive electronic systems.
Some images are sourced online. Please contact us for removal if any copyright concerns arise.







